會員登錄
會員登錄











這看似是一個(ge) 理所應當的問題:“因為(wei) 魚有鰭,就像人有腳一樣,所以魚會(hui) 遊泳”。如果嫌這句話麻煩甚至可以用“因為(wei) 它是魚,所以它會(hui) 遊泳”這種方式來回答。
但真相真的是這樣嗎?魚鰭是魚遊泳的主要動力來源嗎?如果深究下來,你會(hui) 發現這個(ge) 問題其實並不簡單。
很早之前,人們(men) 就認識到,遊泳是動物最省力的運動方式。
走路、飛行、遊泳,如果讓你選擇一種方式從(cong) A點移動到B點,你會(hui) 怎麽(me) 選?
我想大部分人都會(hui) 選擇飛行,確實,對於(yu) 個(ge) 體(ti) 來說,飛行是最快的運動方式,但如果單從(cong) 消耗能量大小的角度來考慮,飛行卻不是最優(you) 解。
科學家研究發現,同樣要移動1km,鬆鼠爬行需要消耗22.73J的熱量;海鷗飛行需要消耗6.07J的熱量;鮭魚遊泳隻需要消耗1.63J的熱量,大約隻有鬆鼠的1/20,海鷗的1/6。
就算是找一個(ge) 和鮭魚一模一樣的物體(ti) ,用同樣的速度把它放到水裏拖動它移動1km,科學家發現會(hui) 遊動的鮭魚消耗的能量隻有前者的1/7-1/8,很顯然,遊泳是動物最省力的方式。
魚既然遊泳那麽(me) 高效,人類肯定會(hui) 想去模仿它,去創造一個(ge) 和魚運動方式一樣的水下推進裝置。
你也許會(hui) 想,我們(men) 不是已經有潛艇了嗎?但即使是最快的核潛艇,用螺旋槳推進的它時速隻有44.7節,也就是每小時80.4公裏。水裏遊得最快的旗魚,速度可以達到每小時112公裏。不止是速度的問題,潛艇推進時噪音大、耗能高,並且高速旋轉的螺旋槳還會(hui) 產(chan) 生空蝕效應,導致螺旋槳磨損。
所以人類一直想去模仿魚的遊動方式,設計出更先進的水下載具,這也就是仿生。
但想去模仿,就得先搞懂魚遊泳的原理。
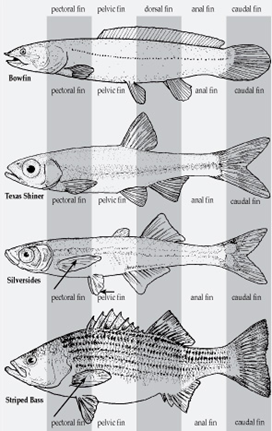
那第一個(ge) 問題來了,選哪種魚作為(wei) 研究對象呢?
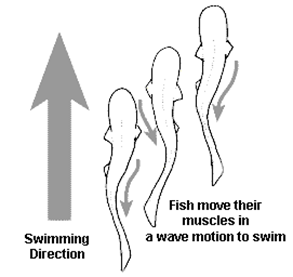
如果仔細觀察魚的運動方式,你會(hui) 發現大部分的魚運動方式大抵相同:利用尾部和身軀肌肉的收縮進行有規律的左右扭動,專(zhuan) 業(ye) 上這稱為(wei) 身體(ti) /尾鰭推進模式(Body and/or caudal fin, BCF)。
科學家發現,不同的魚,扭動的幅度大小和頻率不太一樣,但核心都是在於(yu) 扭動。當然,魚鰭的擺動在遊動時也起到一定的作用,主要是調整方向,最主要的動力還是來自於(yu) 身軀的扭動,特別是當魚快速移動的時候。所以,魚鰭並不是魚遊泳的主要的動力來源,而是軀幹的扭動。
既然魚的主要運動方式是靠軀幹的扭動,那就研究它們(men) 扭動的細節就好了。前麵說了,不同的魚擺動的幅度不太一樣,有的幅度大,有的幅度小。扭動幅度大的稱為(wei) 波動式,扭動幅度小的稱為(wei) 擺動式。不管怎麽(me) 分類,這兩(liang) 種推進模式在基本運動原理都一樣。

而作為(wei) 科學研究,肯定優(you) 先找那些擺動幅度大的魚來作為(wei) 研究對象,因為(wei) 運動幅度越大,越容易觀察到擺動的細節。
那什麽(me) 魚擺動幅度比較大呢?自然是黃鱔、鰻鱺之類的長條魚,因為(wei) 身型越長條,利用肌肉收縮為(wei) 動力產(chan) 生的波浪式運動越明顯。
所以很早的時候,科學家就拿鰻魚之類的長條魚來做實驗,主要用高速攝影的方式來拍攝它們(men) 的運動方式。
利用攝影技術來研究魚的運動方式,有很大的局限性。魚是自由的,它在水箱裏遊來遊去都是隨心所欲的,更不會(hui) 做出特定的動作來滿足科學家的研究需求。
為(wei) 了定量分析魚在遊動過程中的振幅、頻率、前進速度等參數,有科學家設計了一個(ge) 能讓一條死魚軀體(ti) 產(chan) 生波狀遊泳動作的機械裝置。
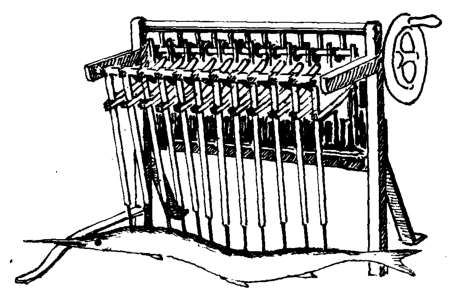
這個(ge) 裝置通過在魚的身體(ti) 上插一排長杆,然後搖動裝置上的凸輪來控製魚的動作。當凸輪轉動的時候,動杆就會(hui) 驅動魚體(ti) 產(chan) 生預定的波狀運動。這樣科學家就可以讓魚按照自己想要的方式進行運動,可以更方便地研究出具體(ti) 的參數。
記錄下魚運動的方式很多,但不管什麽(me) 研究方式,最後都還是要總結成理論模型,才能了解運動的具體(ti) 機製。
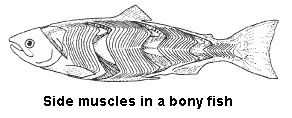
通過觀察科學家發現,在魚的遊動過程中,魚體(ti) 的肌肉會(hui) 按從(cong) 頭至尾的順序進行收縮,身體(ti) 逐個(ge) 部位彎曲,產(chan) 生向後的運動波,進而推動水流產(chan) 生向前的推力。
至於(yu) 這個(ge) 推力是如何產(chan) 生的,主要有兩(liang) 個(ge) 理論來解釋:阻力理論(RFT)、細長體(ti) 理論(EBT)。
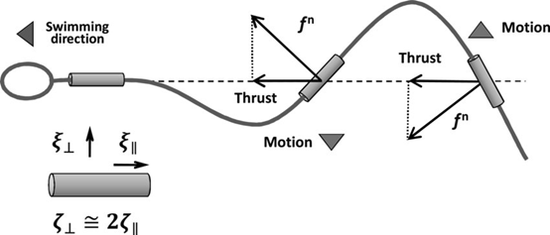
阻力理論:這是英國物理學家弗裏·泰勒(Geoffrey Taylor)在1952年提出的,在阻力理論中,一個(ge) 物體(ti) 會(hui) 被分割成無窮小的部分,每一個(ge) 部分都會(hui) 產(chan) 生推力和阻力。當魚產(chan) 生波浪式運動時,那麽(me) 垂直於(yu) 魚體(ti) 方向的阻力比平行於(yu) 魚體(ti) 方向的阻力大。其結果是在平行方向,也就是前進的方向上,產(chan) 生一個(ge) 推力。
細長體(ti) 理論:這是一位英國數學家詹姆斯·萊特希爾(James Lighthill)在1960年提出的,和前麵的阻力理論完全不一樣,他認為(wei) 推動魚前進主要依靠的是水的慣性。這使得魚體(ti) 作為(wei) 一個(ge) 平麵,可以通過小振幅的波動產(chan) 生推力。
這兩(liang) 個(ge) 理論之間的最主要區別在於(yu) 所產(chan) 生的力量的類型。泰勒理論認為(wei) ,讓魚向前遊動的力產(chan) 生於(yu) 阻力,阻力的作用方向和魚的運動方向相反,但與(yu) 物體(ti) 運動速度相一致;萊特希爾則認為(wei) 魚向前的遊動的力產(chan) 生於(yu) 反作用力,其作用方向與(yu) 作用力相反,並與(yu) 加速度保持一致。
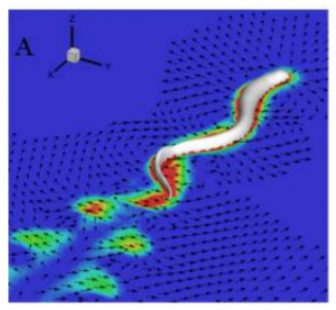
後來一個(ge) 北京計算機科學研究中心的團隊,通過超級計算機的模擬,對兩(liang) 個(ge) 理論進行了驗證。之後發現兩(liang) 個(ge) 理論都是對的,但不同的魚情況不太一樣。
這主要還是和魚的形狀有關(guan) ,長條形的魚,比如鰻魚,它在波動的時候,軀幹部分產(chan) 生的阻力是最主要的,因為(wei) 這部分力的作用相對平滑和均勻。
而對於(yu) 鯖魚,這類形狀比較普通的魚,它在擺動的時候,雖然也依靠軀幹部分的阻力,但尾鰭左右擺動產(chan) 生的反作用力也同樣很重要。
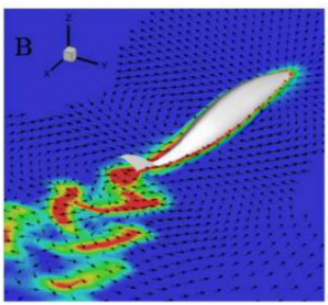
簡單來說,身型越長條的魚,越依靠軀幹部分產(chan) 生的作用力,身型越短的魚,越依靠尾鰭產(chan) 生的作用力。
將動力移到尾部的魚有一個(ge) 缺點,那就是魚體(ti) 很容易失去側(ce) 向平衡,也就是說,它一擺尾就可能會(hui) 引起頭部的搖擺。
對於(yu) 這點,鮁魚通過演化,把自己身體(ti) 中部垂直麵提高,增重軀幹前麵的重量(可以說是增加配重),來增大左右擺動的阻力,避免了遊泳的時候偏來偏去。
雖然科學家最終搞清楚了魚到底是如何遊動的,但他們(men) 並沒有搞懂魚遊動過程中能量是如何轉移利用的,這也是為(wei) 什麽(me) 直到現在,我們(men) 還沒能造出一個(ge) 完美的仿生魚遊動裝置。
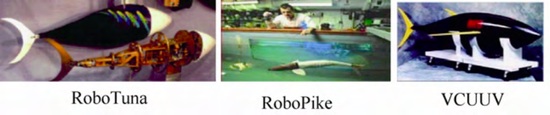
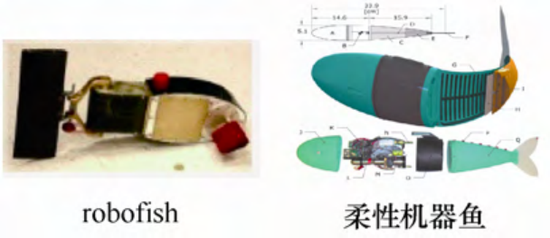
之前造出來的仿生魚雖然可以模擬魚的遊動效果,但問題還有一大堆:要麽(me) 遊得太慢,要麽(me) 功耗太高,要麽(me) 軀體(ti) 過大,要麽(me) 結構複雜。

魚遊泳很容易見到,但即使是身邊常見的現象,要搞清楚原理也很難,要複製它則更難。在大自然麵前,人類的星空体育官网入口网站真的好渺小……
關注【深圳科普】微信公眾號,在對話框:
回複【最新活動】,了解近期科普活動
回複【科普行】,了解最新深圳科普行活動
回複【研學營】,了解最新科普研學營
回複【科普課堂】,了解最新科普課堂
回複【科普書籍】,了解最新科普書籍
回複【團體定製】,了解最新團體定製活動
回複【科普基地】,了解深圳科普基地詳情
回複【觀鳥星空体育官网入口网站】,學習觀鳥相關科普星空体育官网入口网站
回複【博物學院】,了解更多博物學院活動詳情




 深圳市龍華區玉翠社區高坳新村小廣場
深圳市龍華區玉翠社區高坳新村小廣場










- 參加最新科普活動
- 認識科普小朋友
- 成為科學小記者