會員登錄
會員登錄











磁性材料也會(hui) “生長”了!
(來源:受訪者)
當地時間 6 月 19 日,由俄亥俄州立大學軟智能材料實驗室趙芮可教授、佐治亞(ya) 理工學院軟機敏材料力學和 3D 打印實驗室齊航教授擔任共同通訊作者,趙芮可團隊博士生吳帥和博士後迮棄疾博士、以及齊航團隊的匡曉博士擔任共同一作的論文,發表在 Advanced Materials 上,並成為(wei) 當期雜誌的內(nei) 封。

圖 | 趙芮可(來源:受訪者)
論文標題為(wei) 《磁性動態聚合物的模塊化組裝和可重構變形》(Magnetic Dynamic Polymers for Modular Assembling and Reconfigurable Morphing Architectures)。
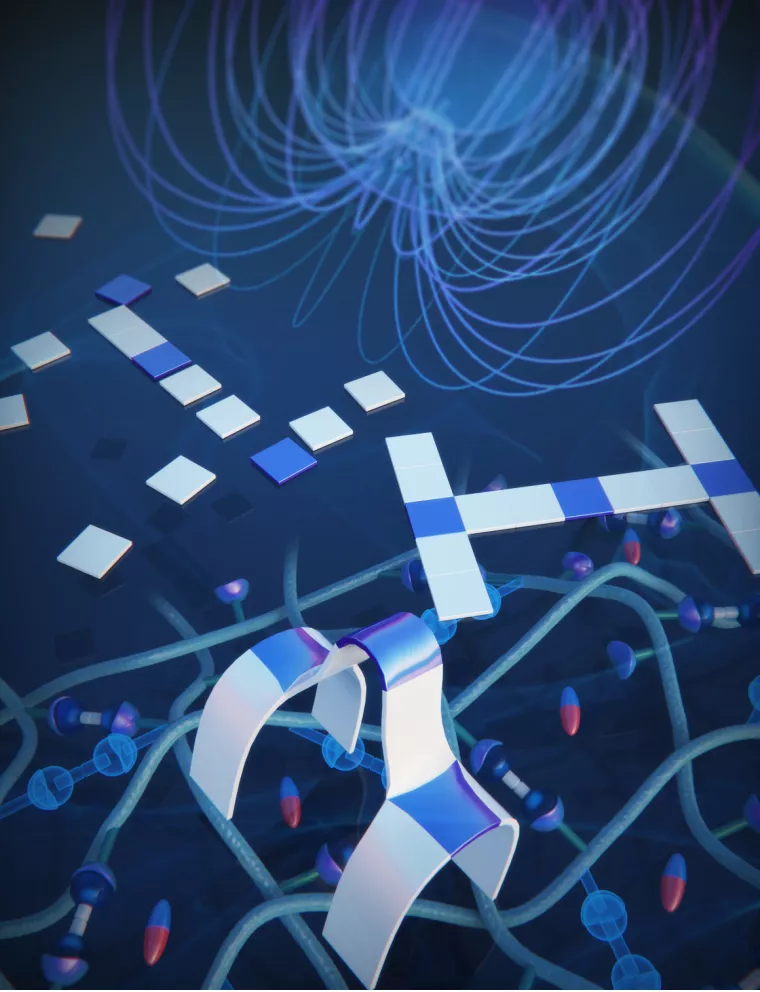
圖 | 當期雜誌內(nei) 封(來源:受訪者)
提及被選為(wei) 內(nei) 封論文,趙芮可說最近幾年磁性軟材料是材料學的一個(ge) 前沿。該文章旨在通過提出新的熱、磁結合響應的軟材料體(ti) 係實現 “原位再編程變形以及重構”,來解決(jue) 傳(chuan) 統磁驅軟材料其永久形狀和磁化分布在材料製備後無法再次改變的問題。
圖 | 相關(guan) 論文(來源:受訪者)
為(wei) 解決(jue) 該難題,她和團隊結合了動態交聯網絡高分子和硬磁顆粒,首次研發出一種新型磁性動態高分子複合材料,該材料可實現複雜三維結構加工和重構、磁化分布重編輯、以及磁驅軟材料模塊化熔焊組裝,其中磁驅軟材料還能被遠程控製。
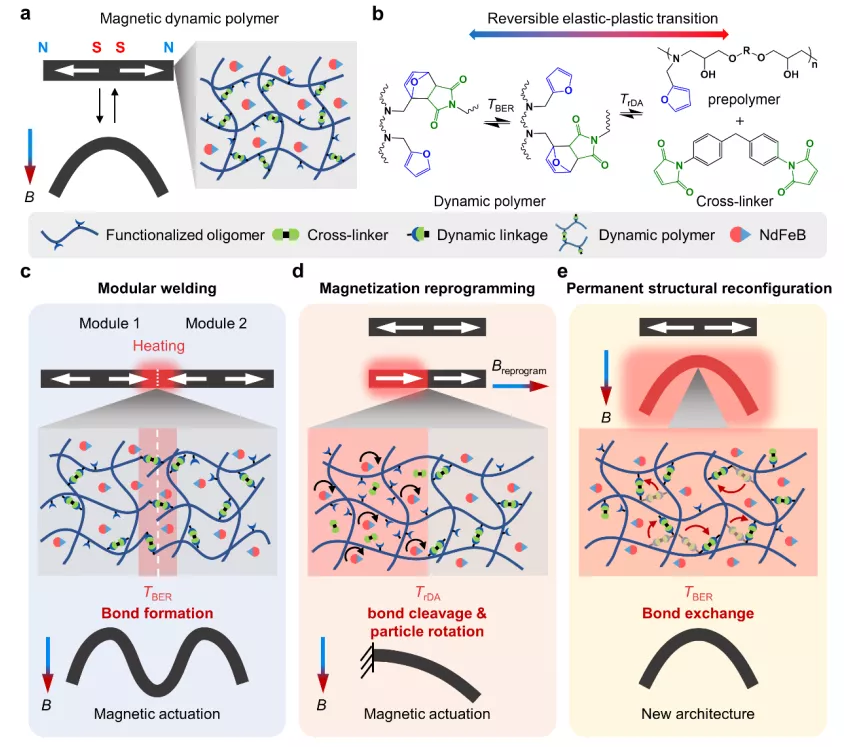
圖 | 磁驅動態高分複合材料的工作機理與(yu) 功能示意圖(來源:受訪者)
據她介紹,該材料具備遠程控製和響應的機製,實現無線驅動的形態變化。通過將驅動力與(yu) 驅動材料分開,小尺寸的功能化材料成為(wei) 了可能。
(來源:受訪者)
如此就可實現遠程控製複雜材料的變形和運動,這種材料一般用於(yu) 做小型軟體(ti) 機器人,尤其可以用於(yu) 醫療領域中的微創和無創操作。
以做手術為(wei) 例,當前大多需要開刀。通過結合對傳(chuan) 統外科手術的學習(xi) ,結合前沿的磁性材料的軟體(ti) 機器人,未來可實現直接以遠程微創甚至無創的形式在人體(ti) 內(nei) 做手術。
(來源:受訪者)
關(guan) 於(yu) 動態高分子交聯網絡、與(yu) 硬磁顆粒相結合的具體(ti) 過程,她告訴 DeepTech,微米級的硬磁顆粒,其實就是微米級別的小磁鐵,它們(men) 在和軟性高分子材料混合後進行交聯。該材料在加熱後,在微觀下的高分子鏈可以一定程度的斷開並重新連接,通過此方式實現宏觀的焊接和可編程重構等多個(ge) 功能。
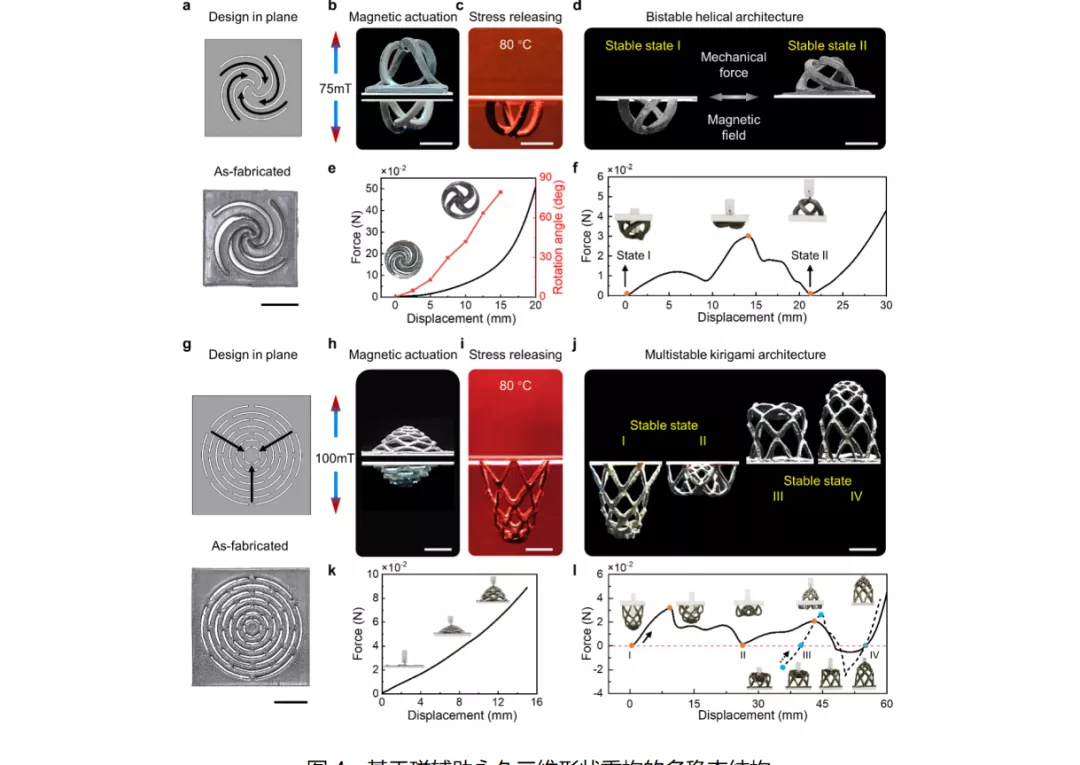
圖 | 基於(yu) 磁輔助永久三維形狀重構的多穩態結構(來源:受訪者)
事實上,任何一個(ge) 三維結合體(ti) ,都可從(cong) 二維的形狀開始,用彈性形變的方式來發生初始形態變化從(cong) 而形成三維體(ti) ,而該工作可以進一步通過動態的高分子鏈重組將彈性變形的三維體(ti) 固定下來。
說到這裏趙芮可舉(ju) 例稱,設想一根用該材料製作的皮筋,在常溫下具有皮筋的一切彈性形變能力。現在將其撐開,對其加熱、然後再進行降溫,這時皮筋變長了,留在變形後的形狀,而且仍然是可以彈性變形的軟材料。
首次實現利用重塑二維結構進行複雜三維結構加工
關(guan) 於(yu) 該研究的獨到之處,趙芮可說其團隊一直研究磁性材料,齊航團隊則在基底材料上有著豐(feng) 富經驗。
此前在磁性材料領域,尚無材料可實現無縫焊接,也沒有材料可通過加熱和加磁場的結合,來實現多功能的集成。
而該工作提出一種加工複雜的三維軟結構的方式,也就是利用材料加工的特性,把其當成一種加工方式,這在之前是沒有的。
(來源:受訪者)
之前的磁性材料,在添加磁場後的確可出現變形,但把磁場撤掉後,材料外形就會(hui) 恢複原狀。
而該團隊通過磁場和熱場的耦合,一是可讓材料變形,二是可讓材料產(chan) 生不同的穩定形狀。
研究中,他們(men) 製備出一種平麵剪紙結構,先給其加上磁場驅動,然後再通過光照對其進行加熱,這時材料內(nei) 應力就會(hui) 逐漸釋放,並可重構成為(wei) 力學多穩態的複雜三維結構,且能用於(yu) 三維結構之間的永久形狀改變。
動圖 | 實現力學單穩態結構向雙穩態的轉變(來源:受訪者)
針對不同的平麵剪紙結構設計,在對其進行永久形狀重構後,該團隊分別實現了結構單穩態結構向雙穩態、以及四重穩態結構的轉變。
動圖 | 四重穩態結構的轉變(來源:受訪者)
實現磁驅軟材料磁化分布原位再編程
趙芮可表示,在小的外磁場下,內(nei) 部磁顆粒會(hui) 發生快速的物理旋轉。在降溫後,新形成的動態交聯網絡會(hui) 鎖定內(nei) 部磁顆粒的磁化方向。
此時,借助圖案化紅外光、對材料進行加熱,即可實現複雜磁化再編程,而且是可反複進行的磁化編程。
具體(ti) 來說,材料加熱到 120 °C 左右時,動態交聯網絡打開,材料粘度降低,等於(yu) 變成蜂蜜狀的粘稠半液體(ti) 狀態。
如下圖 c,白色箭頭便是磁化方向,這些方向由圖 a 中的紅藍色微粒決(jue) 定,每一顆微粒代表著對應的硬磁顆粒,每一個(ge) 白色箭頭代表著磁化的方向。
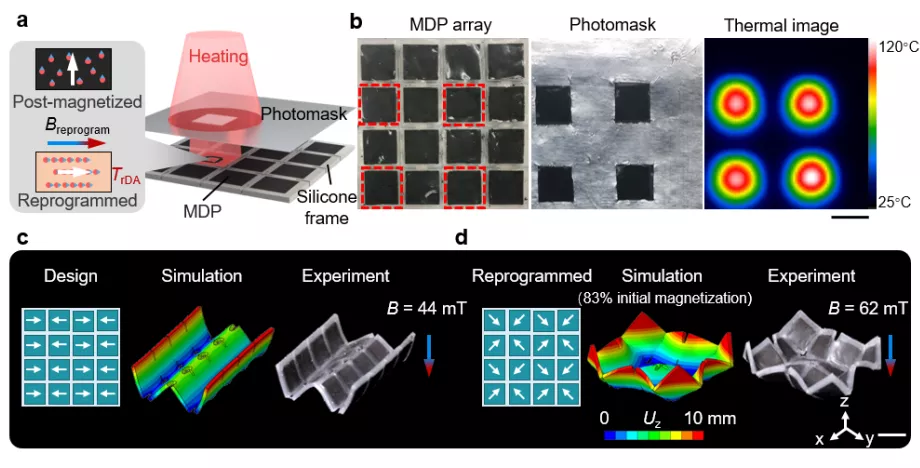
圖 | 磁性動態高分子複合材料磁化分布原位編程(來源:受訪者)
在材料變為(wei) 粘稠半液體(ti) 狀態後,硬磁顆粒就能在基底中自由旋轉。即增加外界磁場,即可調整微粒的指向,這也正是原位編程的概念。
動圖 | 不同的變形之一(來源:受訪者)
具體(ti) 步驟是通過加熱和加磁場,來實現對每個(ge) 模塊磁化方向的任意轉變,從(cong) 而通過遠程編程法,來實現磁化分布的改變,讓材料在同樣磁場下實現不同的變形,不同變形代表著不同的功能。
動圖 | 不同的變形之二(來源:受訪者)
實現磁驅材料形狀與驅動模式的高度定製化與可編程化
通過遠程控製模塊導航與(yu) 組裝,並集成形狀與(yu) 磁化的重構功能,該團隊還實現了磁驅材料形狀與(yu) 驅動模式的高度定製化與(yu) 可編程化。
利用三維磁場操控模塊的翻滾和旋轉運動,可對不同模塊的組裝進行遠程控製。此外,利用激光還可實現遠程焊接,進而可獲得複雜的磁驅組裝結構。
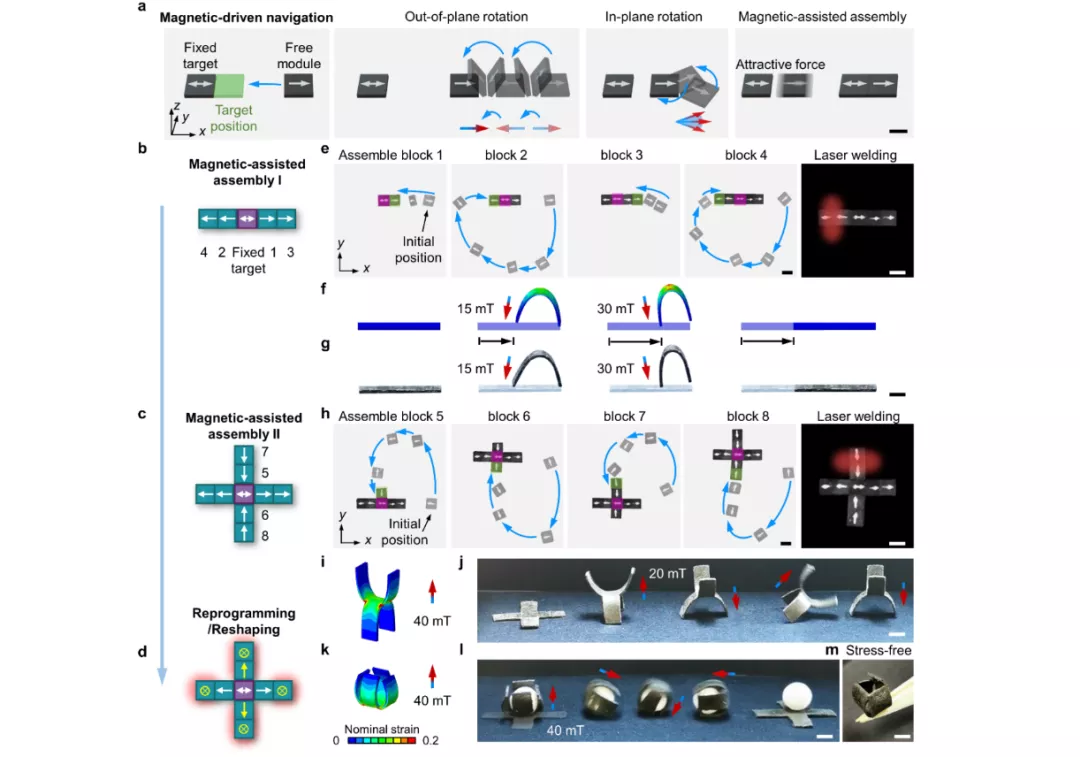
圖 | 磁力驅動模塊的遠程導航組裝與(yu) 多功能集成原位重構(來源:受訪者)
其中,還可實現對同一結構的重構磁化分布和永久變形,這樣一來結構的驅動模式和功能也會(hui) 被改變。
這樣的好處在於(yu) ,假如讓材料到受限製空間中運動,往往無法讓大物體(ti) 進入狹窄空間,但可以讓各種模塊,在遠程磁場的趨勢下,像變形金剛一樣自己組成功性能軟體(ti) 機器人。
動圖 | 磁體(ti) 組成軟體(ti) 機器人(來源:受訪者)
利用磁性 “邏輯單元” 設計,實現多種結構的磁輔助模塊化組裝和熔焊
關(guan) 於(yu) 該研究實現的磁驅軟材料模塊化熔焊組裝功能,趙芮可說,首先是讓小方塊借助磁力拚接起來,但是假如它們(men) 之間連接的部分沒有固定,就會(hui) 散掉。
(來源:受訪者)
這時就會(hui) 用到化學熔焊,即讓材料在高溫條件下,斷開化學鍵、並重新和旁邊的鏈條連接。比如兩(liang) 個(ge) 斷開的模塊並在一起時,如果用機械外力去掰它,很容易就會(hui) 分開。
但是,當對其進行加熱,材料界麵就會(hui) 以化學方式連接起來,這一過程相當於(yu) 焊接。
具體(ti) 來說,在磁吸引力的輔助下,不同模塊會(hui) 緊密相連著,加熱到 80 °C 左右,動態高分子基底可在接觸麵上,生成新的化學連接並被焊接在一起。
讓兩(liang) 種方形基本 “邏輯單元” 即單向磁化與(yu) 雙向磁化,進行不同組合後即可實現扭轉、彎曲、扭轉 - 彎曲、同向彎折和垂直彎折五種變形模式。據趙芮可介紹,該方法可用於(yu) 任意形狀的組裝與(yu) 複雜結構驅動。
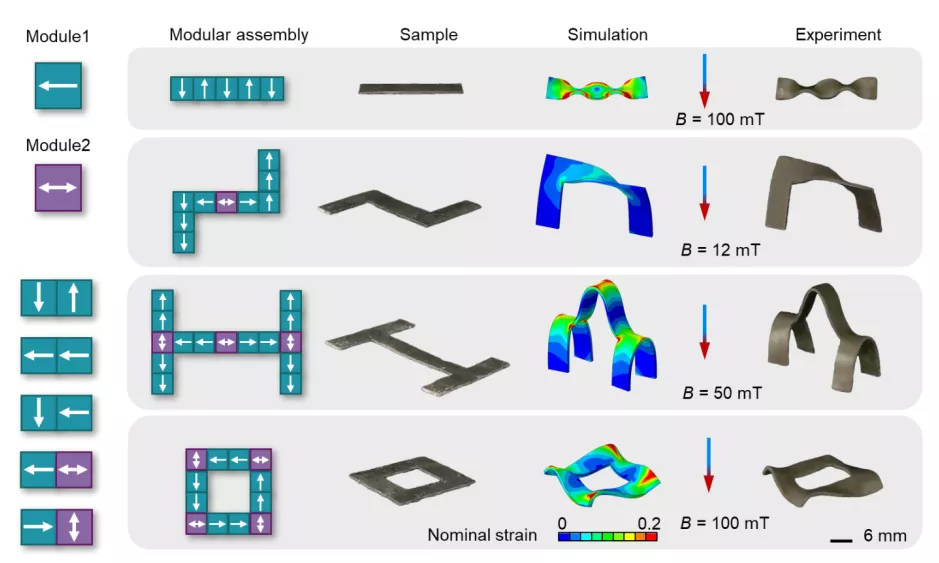
圖 | 磁性動態高分子複合材料用於(yu) 磁輔助模塊組裝、焊接與(yu) 驅動(來源:受訪者)
就磁機器人的磁材料,提供出小型化方案
在應用方麵,趙芮可表示,傳(chuan) 統機器人需要電機驅動,因此體(ti) 積非常大。但如果用磁這樣的場來控製材料,驅動裝置可以和變形機構分開。
即,外加磁場承擔著驅動裝置的作用,當材料本身就是驅動器,如此一來機器人體(ti) 積就會(hui) 非常小。這也是為(wei) 何它能應用到醫學領域,實現遠程控製軟體(ti) 機器人去做複雜操作的原因。
談及過往,她告訴 DeepTech,自己從(cong) 小成長在西安,本次合作的齊航也是西安人。
2012 年,趙芮可畢業(ye) 於(yu) 西安交通大學機械工程係。本科畢業(ye) 後,她留學美國布朗大學,主要從(cong) 事計算力學以及軟材料的穩定性研究。在麻省理工學院(MIT)做博士後研究期間,開始磁性軟材料的工作。
2018 年,她入職美國俄亥俄州立。她說:“我的課題組裏學生背景多元化,實驗室交叉學科的環境,有利於(yu) 產(chan) 生創新思想以及幫助學生成長。我非常欣賞中國學生刻苦努力、樂(le) 於(yu) 積極思考的特質,與(yu) 美國學生樂(le) 於(yu) 和人交流的特質結合後,學生們(men) 會(hui) 產(chan) 生更好的科研成果。”
2021 年 9 月,趙芮可教授將加入斯坦福大學機械係,她和學生也即將迎來新起點。談及未來她表示,在生物醫療器械、軟體(ti) 機器人、柔性器件、以及航空航天領域,軟物質材料均具備無限前景。
而高校科研的魅力在於(yu) ,可將個(ge) 人科研探索樂(le) 趣與(yu) 實際應用進行結合。趙芮可也期望自己的學生們(men) 無論背景如何,都能共同享受科研的樂(le) 趣。
關(guan) 注【深圳科普】微信公眾(zhong) 號,在對話框:
回複【最新活動】,了解近期科普活動
回複【科普行】,了解最新深圳科普行活動
回複【研學營】,了解最新科普研學營
回複【科普課堂】,了解最新科普課堂
回複【科普書(shu) 籍】,了解最新科普書(shu) 籍
回複【團體(ti) 定製】,了解最新團體(ti) 定製活動
回複【科普基地】,了解深圳科普基地詳情
回複【觀鳥星空体育官网入口网站】,學習(xi) 觀鳥相關(guan) 科普星空体育官网入口网站
回複【博物學院】,了解更多博物學院活動詳情



 深圳市華強北街道 華新地鐵站A1出口24小時科學銀行
深圳市華強北街道 華新地鐵站A1出口24小時科學銀行










- 參加最新科普活動
- 認識科普小朋友
- 成為科學小記者