會員登錄
會員登錄











星敏感器是以恒星為(wei) 參照係,以星空為(wei) 工作對象的高精度空間姿態測量裝置,通過探測天球上不同位置的恒星並進行解算,為(wei) 衛星、宇航飛船等航空航天飛行器提供準確的空間方位和基準,並且和慣性陀螺一樣都具有自主導航能力,具有重要的應用價(jia) 值。
星敏感器工作原理為(wei) :圖像傳(chuan) 感器拍攝當前視場範圍內(nei) 的星空圖象,圖像經信號處理,提取星體(ti) 在觀測視場中的位置(和亮度)信息,並由星圖識別算法在導航星庫中找到觀測星的對應匹配,用這些匹配星對計算出星敏感器的三軸姿態。
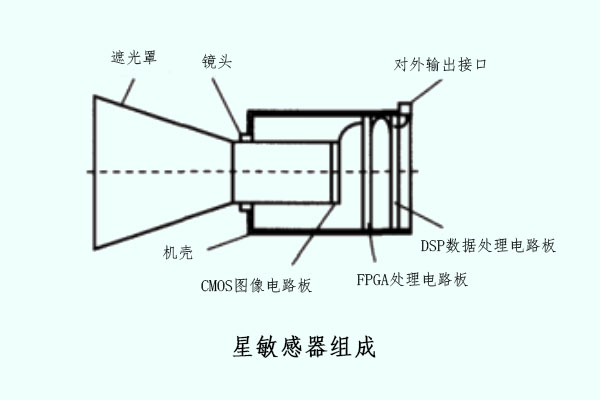
星敏感器總體(ti) 結構包括:光學係統、CMOS圖像電路、FPGA處理電路、DSP數據處理電路、機械結構等部分。圖像鏡頭中,成像在CMOS圖像傳(chuan) 感器的焦平麵上。FPGA中驅動電路對CMOS發出時序控製信號,CMOS正常工作後,讀取圖像數據,預處理讀取的圖像數據,包括數據位的轉換和實時的星點細分定位。將所得的星點位置和亮度信息傳(chuan) 輸給數字信號處理器(DSP)進行星圖識別和星體(ti) 目標跟蹤,最後輸出姿態信息。
星敏感器通常包含全天球識別工作模式和星跟蹤工作模式。在全天球工作模式下,星敏感器通過光學鏡頭在視場範圍內(nei) 拍攝得到星圖,經過星點質心定位、星圖識別和姿態解算等步驟之後,直接輸出姿態信息。在星跟蹤模式下,星敏感器利用先驗姿態信息,進入星跟蹤算法模塊,通過局部的星點質心定位和識別最終解算出當前姿態信息。
截止到目前為(wei) 止,研究人員已經研製出很多不同類型的星敏感器產(chan) 品並且成功應用。在研究過程中,研究人員發現通過采用多視場的星敏感器設計方法,可以在不改變探測星等的情況下減小視場,保證星敏感器的姿態測量精度。
現如今,天文自主導航已經成為(wei) 航天器技術中重要的領域,也是未來發展的主要趨勢。作為(wei) 高精度的姿態測量儀(yi) 器,星敏感器必然有良好的發展和應用前景。
本文由石家莊槁城區興(xing) 安鎮中學高級教師崔會(hui) 欣進行科學性把關(guan) 。
新華網科普事業(ye) 部
科普中國-科學原理一點通
聯合出品
作者: 尹茹
歡迎掃碼入群!
深圳科普將定期推出
公益、免費、優(you) 惠的活動和科普好物!




 深圳市華強北街道 華新地鐵站A1出口24小時科學銀行
深圳市華強北街道 華新地鐵站A1出口24小時科學銀行










- 參加最新科普活動
- 認識科普小朋友
- 成為科學小記者