會員登錄
會員登錄











無人機首次成功在一對一冠軍(jun) 賽中戰勝人類對手,而無人機背後是一個(ge) 名為(wei) Swift的人工智能係統,《Nature》期刊的封麵上的也在當期封麵刊登了相關(guan) 論文。
AI如何成為(wei) 遊戲高手?
國際象棋、星際爭(zheng) 霸(StarCraft)、Dota2和GT賽車這些遊戲,如果你與(yu) 電腦對戰,那些電腦虛擬玩家是如何來完成一係列操作的?
或許你沒有聽說過深度強化學習(xi) (Reinforcement Learning,RL)係統,但你一定聽說過或接觸過或許你沒有聽說過深度強化學習(xi) (Reinforcement Learning,RL)係統,因為(wei) 這些電腦虛擬玩家就是運用了這一技術。
在模擬和棋盤遊戲環境中,AI可以輕鬆勝過人類,但在物理世界的競賽,AI的決(jue) 策和操作則麵臨(lin) 諸多困難。
第一人稱視角 (FPV) 無人機競賽是專(zhuan) 業(ye) 選手在 3D 賽道上駕駛高速飛行的無人機,駕駛員可以通過機載攝像頭傳(chuan) 輸的畫麵從(cong) 無人機的角度觀察環境,從(cong) 而完成加減速、轉彎等操作,讓無人機穿越賽道中的障礙。
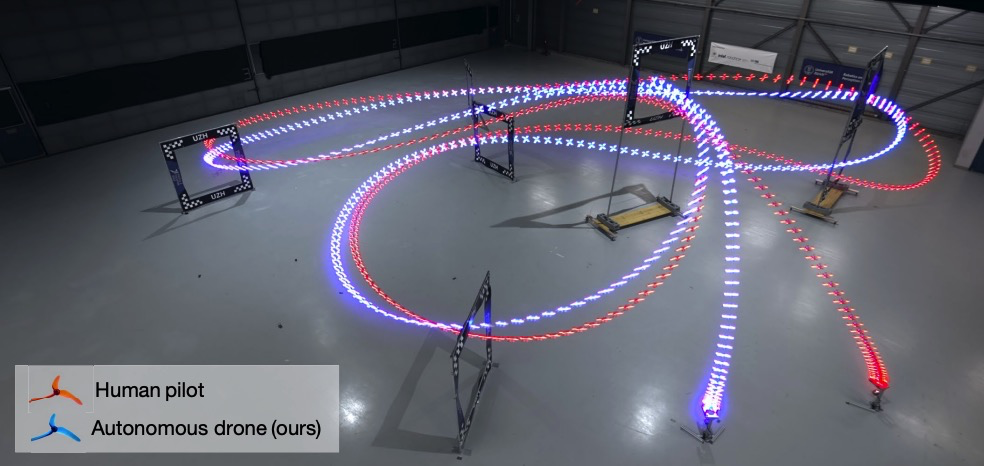
Swift (藍色)和人類(紅色)交鋒,七個(ge) 方形門,每圈必須依次通過,圖片來源:參考文獻
自動駕駛無人機要達到職業(ye) 飛行員的水準很難,因為(wei) 機器人需要在其物理限製下飛行,同時隻能根據機載傳(chuan) 感器估算其速度和方位。
傳(chuan) 統的無人機競速方法包括軌跡規劃和模型預測控製(model predictive control,MPC),但這種方法隻能在理想條件下實施,一旦受到任何幹擾,整個(ge) 係統就會(hui) 崩潰。

圖片來源:piqsels
而Swift係統克服了這個(ge) 困難。Swift係統由兩(liang) 個(ge) 關(guan) 鍵模塊組成:
一是感知係統,將高維視覺(即空間立體(ti) 視覺)和慣性信息轉換為(wei) 低維編碼;
二是控製係統,攝取感知係統產(chan) 生的低維編碼並產(chan) 生控製命令。將這兩(liang) 個(ge) 係統結合起來,便可以基於(yu) 物理環境的細微變化進行實時決(jue) 策調整。
當然,先進的感知係統和控製係統還不足以對抗人類冠軍(jun) 駕駛員。
Swift係統比人類強在哪兒(er) ?
Swift係統比人類駕駛員具有一定的結構優(you) 勢。
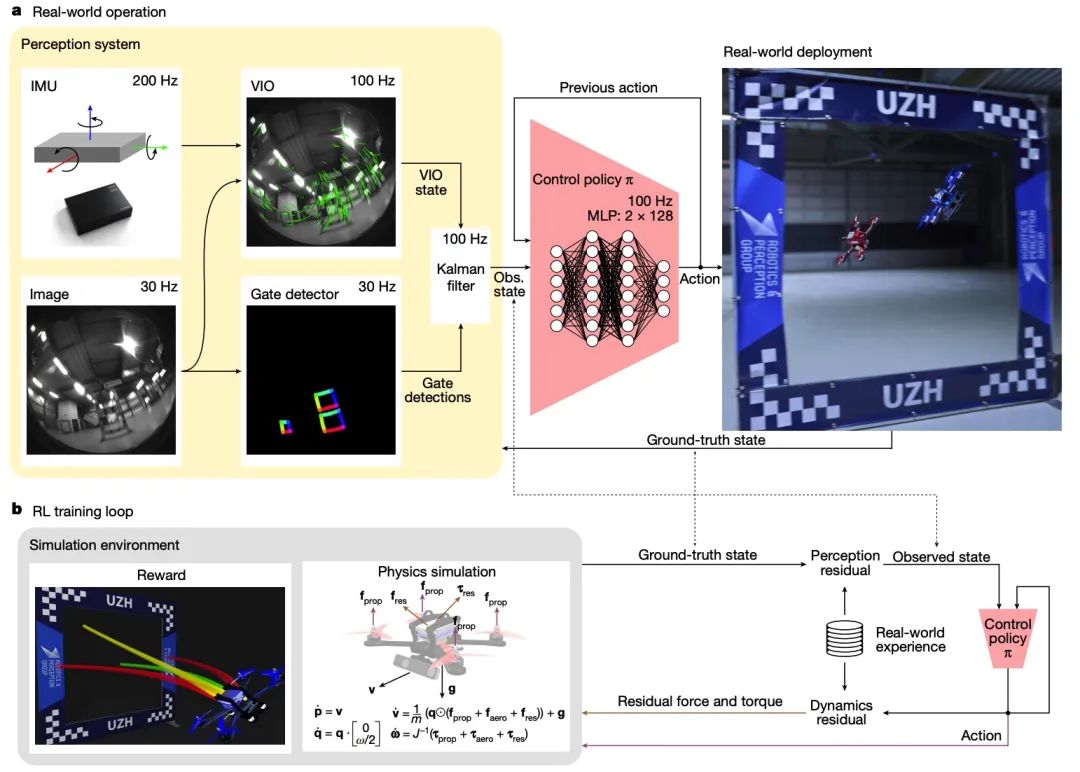
Swift係統,圖片來源:參考文獻
首先,它能利用來自機載慣性測量單元的慣性數據。
這類似於(yu) 人類的前庭係統,人類駕駛員在比賽中無法使用該係統,因為(wei) 他們(men) 實際上並不在飛機上,並且感覺不到作用在飛機上的加速度。
其次,Swift係統受益於(yu) 較低的感覺運動延遲(Swift為(wei) 40毫秒,而人類專(zhuan) 家的平均延遲為(wei) 220毫秒)。
FPV比賽使用的是四軸飛行器,它是有史以來最敏捷的機器之一。在比賽中,飛行器會(hui) 施加超過自身重量五倍或更多的力量,即使在有限的空間內(nei) ,速度也能超過100公裏/小時,加速度是重力的幾倍。因此,較低的延遲有助於(yu) 讓飛行器的行動更靈活。
在實際比賽流程中,人類飛行員在賽道上進行了為(wei) 期一周的練習(xi) 。之後,由Swift和人類控製的無人機需要在場地賽道中以正確的順序穿過每一道門。Swift在與(yu) 三位人類冠軍(jun) 正麵交鋒的比賽中均獲勝,甚至創造了最快完成比賽的記錄。

圖片來源:piqsels
在AI控製的無人機戰勝人類之後,自主移動機器人仍然有很多可以提升的方向。
例如人類控製無人機時,即使發生了碰撞,隻要硬件仍然正常工作,人類仍然可以控製無人機繼續飛行並完成這段賽道,但Swift沒有接受過碰撞後恢複的訓練。
即便存在諸多限製,但該研究成果已經成為(wei) 移動機器人技術和機器智能的一個(ge) 裏程碑,它將助力自動駕駛的地麵車輛、飛行器和個(ge) 人機器人的快速發展。
參考文獻
原論文:Kaufmann, E., Bauersfeld, L., Loquercio, A. et al. Champion-level drone racing using deep reinforcement learning. Nature 620, 982–987 (2023). https://doi.org/10.1038/s41586-023-06419-4
策劃製作
來源丨科協之聲
作者丨SamKakeru 科普作者
責編丨楊雅萍 金禹奮
歡迎掃碼關(guan) 注深i科普!
我們(men) 將定期推出
公益、免費、優(you) 惠的科普活動和科普好物!




 深圳市龍華區玉翠社區高坳新村小廣場
深圳市龍華區玉翠社區高坳新村小廣場










- 參加最新科普活動
- 認識科普小朋友
- 成為科學小記者